
Notifications
Clear all



2019-06-22 7:51 pm
Oops - I re-read your first post and see that its a TOF laser range finder!
?
"Never trust a computer you can’t throw out a window." — Steve Wozniak


Topic starter
2019-06-22 9:58 pm
Hi Bill,
I was hoping to have some photos by now but I've been working on the radio modem (I have a working prototype so I can do without the Wi-Fi) so Eric is still in bits but I'll try and do something soon. He has evolved quite a bit since his last photo-shoot.
To answer your question, there is a non-contact temperature sensor and a TOF laser range finder so Eric can build a 3D picture of his surroundings. There is also a light sensor. I have since added an OLED display and I'm moving the ultrasonic sensor from the head to the base as replacements for the IR sensors (IR sensors do not work in this situation). The humidity sensors check for condensation and the temperature sensor can look for a better place to be or not go into a cold damp area to start with.
I'm still waiting for parts from China, the extra rangefinders so I can fit four around the body and the cameras for the Video SLAM system and that could take anything up to two months to arrive.
I'm still a long way from doing more than have Eric bounce off walls.
Mandy
This post was modified 5 years ago by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.
DroneBot Workshop reacted
Topic starter
2019-06-22 10:54 pm
Hi Mandy,
Very nice project and I encourage you to post full details about the design and coding If you please.
Hi Nawar,
I'll be able to provide a better description with some photos.
As for code, I doubt I'll be posting that as it will not be of any use to anyone as it will only run on Eric. What I will do is explain the relationships between the parts of Eric and how they come together to give some sort of AI.
I'm happy to provide the drawings for the control board so people can see what I'm doing. You can find the last version at SchematicEric.pdf
I'd like people to take my ideas and do their own thing with them. Although I have not had to pay for some of the expensive chunks thanks to birthdays I'm trying to work with parts that are $0.99 or less so anyone should be able to afford it.
Mandy
This post was modified 5 years ago by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.

2019-06-23 1:19 am
Hi Mandy,
Can I ask what compass module are you using?
Thanks,
Scott
Topic starter
2019-06-23 1:44 am
Hi Mandy,
Can I ask what compass module are you using?
Thanks,
Scott
It's a Honeywell HMC5883L, 3-Axis Digital Compass module. Ebay, from China.
It fits in with the MPU-6000/6050 Motion Tracking (Gyro) chip and you can run them together for an "enhanced" output (or so it says) but I'm running them separately for now. I may experiment with them connected in the future.
These devices are I2C so easy to interface.
Don't expect a compass to work well indoors as every electrical wire, water pipe and rusty nail will throw it out. Eric has a map of magnetic deviations in memory but it is only used as a starting point in the SLAM computations.
Mandy.
This post was modified 5 years ago 2 times by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.
2019-06-23 1:56 am
Thanks, Mandy. That's the one I use now.
Topic starter
2019-06-23 2:12 am
It's an annoying little thing, I spent ages setting it up and then I moved a screwdriver. That is nothing compared to how it reacts to the metal filing cabinet under my desk.
?
This post was modified 5 years ago by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.
Topic starter
2019-06-27 6:59 pm
Hi All,
So I eventually managed to get some photos.
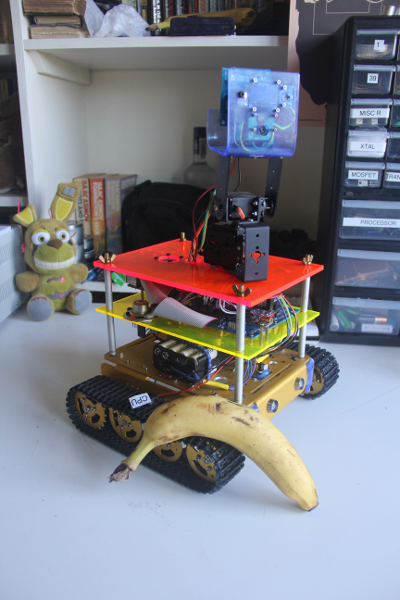
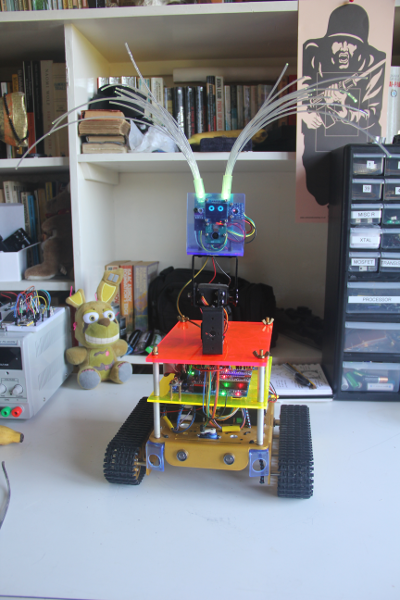
Eric (with banana for scale)
The base contains the drive and batteries.
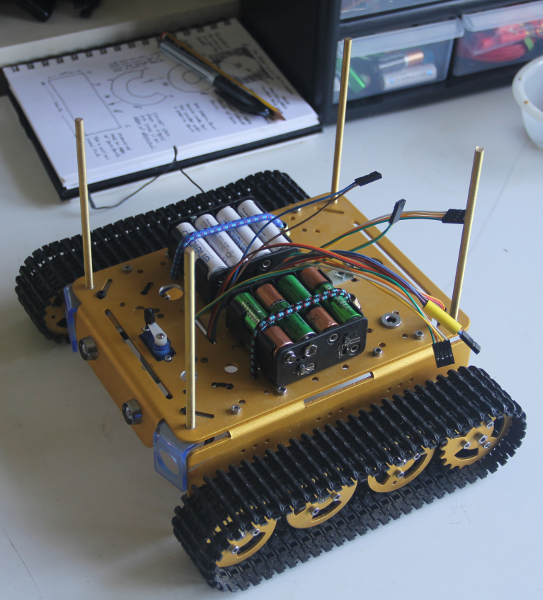
The parts mount on threaded rods with spacers.
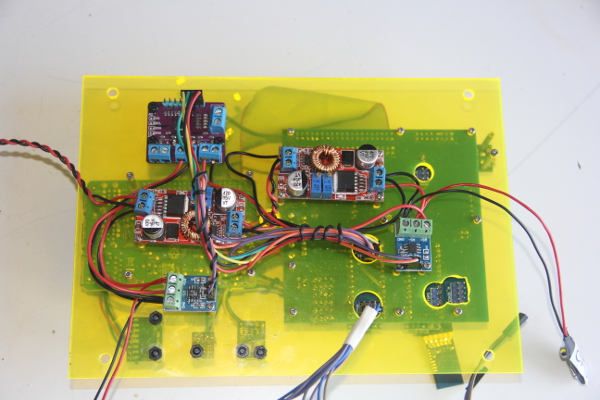
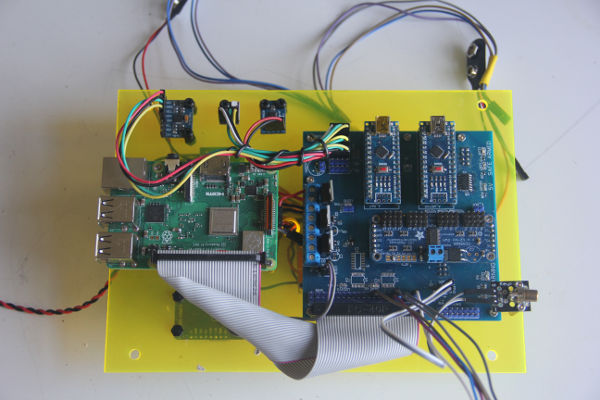
The mid section contains the power monitoring on one side and the Pi and control board on the other.
The top section holds the pan and tilt head and a fan above the Pi.
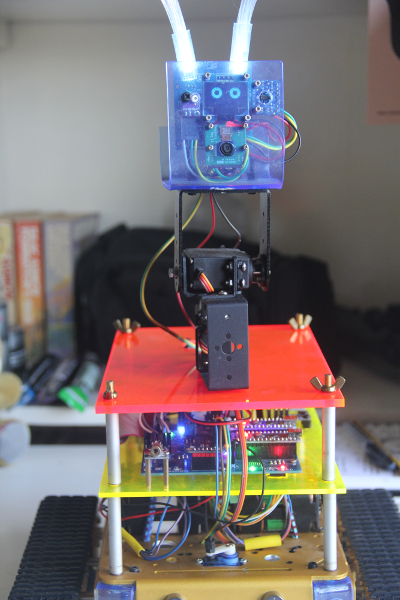
The finishing touch is the fibre optic hair but it could do with some styling with a heat gun.
I'm still waiting for parts from China, so I'll have to find another mini project to do.
Mandy
This post was modified 5 years ago by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.
2019-06-27 7:08 pm
Very nice work!

2019-06-27 7:27 pm
Very impressive project Mandy
ERIC - Enhanced Robotics Intelligence Concept
DroneBot Workshop Robotics Engineer
James
Mandy reacted
2019-06-27 7:30 pm
It looks like your compass is less than 6" from the motors. I would raise it at least 6-8" above. I usually have it on a pole. On my home nav, I have tested it at 9+ inches above and get no noticeable interference from the bot. Refrigerators and ovens will still be an issue though 🙁
Mandy reacted

Topic starter
2019-06-27 8:56 pm
It looks like your compass is less than 6" from the motors. I would raise it at least 6-8" above. I usually have it on a pole. On my home nav, I have tested it at 9+ inches above and get no noticeable interference from the bot. Refrigerators and ovens will still be an issue though 🙁
I have given up trying to get the compass to give a human readable output. The compass north(ish) depends on the location (or, how far away from the fridge Eric is). Eric can calibrate his own compass on start up but that will not help once things are running, this graph is of a number of parameters used in navigation:
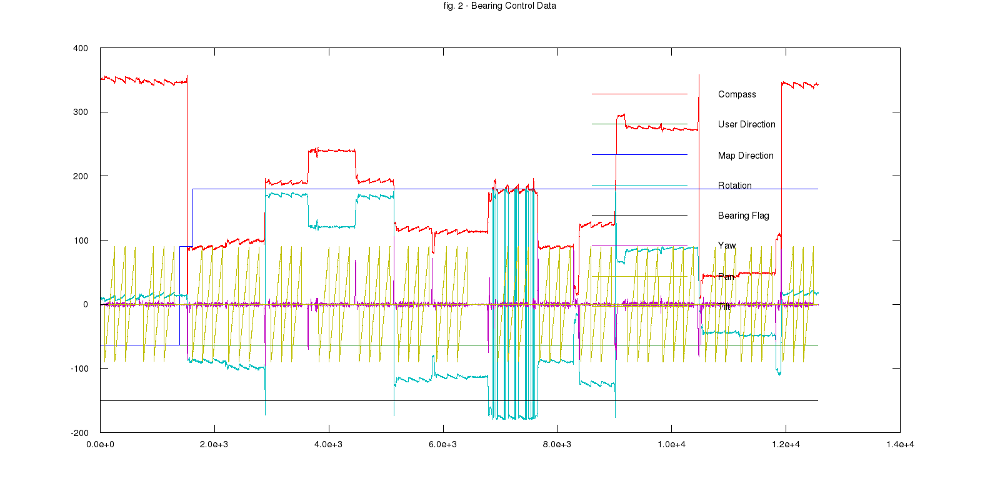
In this example, Eric is rotating on the spot, stopping and then taking three scans of the area with the pan head. The yellow trace is the pan head position and the red trace is the compass reading. As you see the pan head throws the compass out by 5 degrees. Another useful parameter is the yaw sensor (purple trace), it shows that the robot is rotating. Eric therefore knows if he is rotating or not, if he is not rotating and the compass is moving around then something is throwing it off. By checking for a pattern in the other information Eric can isolate the problem. Knowing that the servos are the only thing moving Eric can factor in a correction.
Even after all of that the compass is still of little use because of the fridge effect and a square room looks like this to Eric:
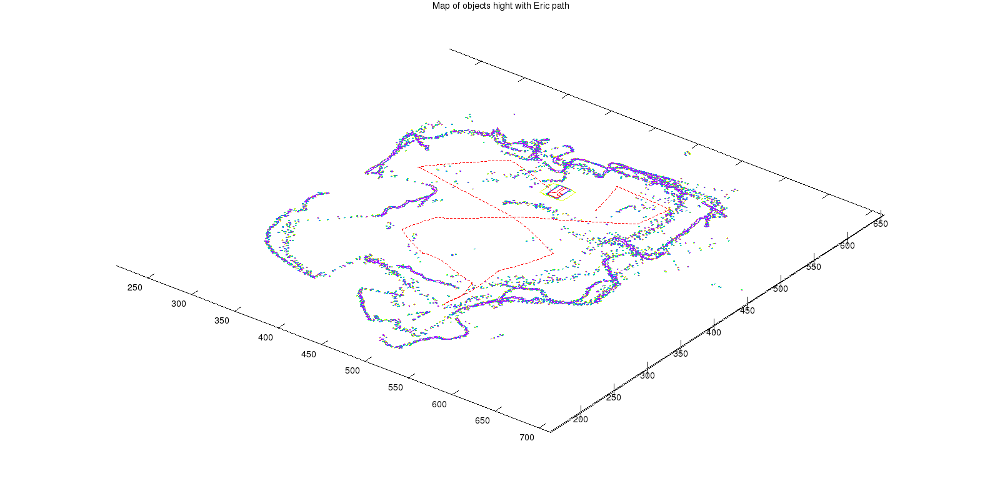
(There is a fridge at the bottom corner of the map.)
Mandy
This post was modified 5 years ago by Mandy
The 600 series had rubber skin. We spotted them easy, but these are new. They look human... sweat, bad breath, everything. Very hard to spot.
2019-06-27 10:36 pm
Mandy, what software(s) are you using to produce your graphs? Are these programs that came with hardware you are using? Or something else?
DroneBot Workshop Robotics Engineer
James