
Notifications
Clear all

Topic starter
2019-09-21 9:20 pm
Yes you are probably right. For some reason I don't find chain driven wheels aesthetically pleasing in a robot base. However I think all the robot vacuum motors I have used incorporated a notched belt to drive the wheel.
I used to love the freedom of riding my motor bike during my teen years.


2019-09-21 10:01 pm
However I think all the robot vacuum motors I have used incorporated a notched belt to drive the wheel.
It might be informative to understand that many of my design decisions are based on what I happen to have laying around. I actually have quite a few bicycle chains laying around in the shop waiting to be used on a project. I don't have notched drive belts laying around. In fact I had actually considered going that route and looked up the cost of belts the sizes I would need. When I saw the prices including the proper spockets they run on, that immediately caused me to return to thinking about the free chains I already have. ?
I'm just not in a position to be spending $40 or $60 on parts with every aspect of the design. This stuff starts adding up really quickly.
I like the following equation:
free + (free * 12) + (4 * free) + free² = free ?
You just can't beat using free parts. Nothing else compares.
And no matter how big your equation gets the final result still equals free.
Thus far my robot base in the photo cost about $12.
And that was the cost of the 4 tires and wheels that even came with bearings installed.
I made the axles from an old farm hay rake = free
And I had the plywood given to me as well = free
And soon I'll have bicycle chains on it = free
Not sure about the chain sprockets yet. They are expensive to buy and while I have a lot of bicycle sprockets laying around none of them are the exact sizes I need. So I'm looking into the possibility of manufacturing my own sprockets from scrap metal. I already have the metal working machines to easily make the sprockets including a dividing head and milling machine. What I don't yet have is suitable metal stock to make them from. And so that's really what's currently holding up progress on this base unit at the moment. Well, that and the fact that I'm spending all my current time rebuilding a wood stove boiler.
DroneBot Workshop Robotics Engineer
James
Topic starter
2019-09-21 11:07 pm
Talking about bicycles reminded me of this robotic base which appealed to me as a cheap way to build an outdoor rover. Still looks like a cheap solution to me?
http://cyberneticzoo.com/cyberneticanimals/1960-stanford-cart-american/
Our local rubbish tip has a recycle shop full of old bicycles. I don't know how much two new identical bikes (perhaps child size) would cost to perhaps build such a base.
Large wheels means you can roll over lots of obstacles in the forest. One of my first attempts at a robot base was two bicycle wheels and two 12 volt hand drills meant to be connected to a car battery. The weight of the car battery kept it from tipping over.

A simple box frame of welded angle iron with two notches for the wheel axis to fit and be bolted by the nut used to bolt the the original u shaped end piece of the bike.
2019-09-21 11:25 pm
Our local rubbish tip has a recycle shop full of old bicycles. I don't know how much two new identical bikes (perhaps child size) would cost to perhaps build such a base.
That looks like a base that could be real useful for an outdoor robot that could have a lot of practical capabilities. Or even indoors in a large enough building. It looks to be very sturdy and capable.
Based on the photos it appears that all four wheels are steerable. This means that you would actually need four scrap bicycles for this project since you would need four front fork assemblies.
Although I imagine something similar could be built just using two bicycles attached together in parallel and only using the front wheels for steering. But the one in the article appears to have all four wheels steerable.
In fact if you look closely at the following photo of it you can see that all four wheels appear to be steered at the same time with a single very long chain that basically goes around the entire robot steering each wheel at the corner with a sprocket. So apparently all the wheels must be steered in the same direction simultaneously in synchronization with each other.
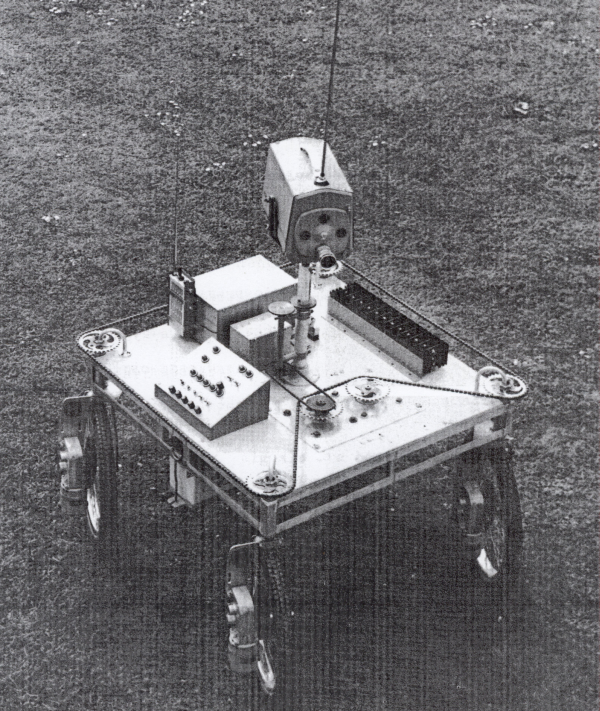
That's an interesting design. It would be nice to see a video of it in motion. They actually have a link to a video of it in that article, but unfortunately that link doesn't appear to be working.
DroneBot Workshop Robotics Engineer
James
Topic starter
2019-09-22 12:39 am
In fact if you look closely at the following photo of it you can see that all four wheels appear to be steered at the same time with a single very long chain that basically goes around the entire robot steering each wheel at the corner with a sprocket. So apparently all the wheels must be steered in the same direction simultaneously in synchronization with each other.
That's an interesting design. It would be nice to see a video of it in motion. They actually have a link to a video of it in that article, but unfortunately that link doesn't appear to be working.
That was one of the designs. Having the four wheels turn like that makes no sense to me as I think it should always move in the direction the robot is "looking".
https://www.rakeshmondal.info/4-Wheel-Drive-Robot-Design
I can see an advantage with this arrangement linking just the front wheels to each other and the back wheels to each other.

The link to it running about a soccer field works for me.
This is a link to the other video. Shows the video camera sliding. Not sure why the lights have to flash.
2019-09-22 1:43 am
The one in the video you posted appears to be different from the one in the photo I posted from the article. Apparently they must have had several different versions of it. The one in the video you posted appears to only be steering the front two wheels while the rear wheels just remain fixed.
DroneBot Workshop Robotics Engineer
James
Page 2 / 2
Prev